The use drones, aeroplanes and boats to capture topography is becoming more and more popular. As the cost and software\hardware improves the speed and accuracy these types of surveys provide is becoming increasingly compelling. Lidar (Light Detecting and Ranging) surveys use a laser to read the surface elevation. They are usually mounted on boats or aeroplanes and can penetrate through light foliage and water. Photogrammetry is frequently used by drones. The drones take 1000s of photographs of the site at different positions. These photographs are then loaded into a computer and by analysing the parallax effect of the images in a sequence an elevation surface can be generated.
Both these processes produce data that can be loaded into Kubla Cubed as a point cloud. The one problem is that the data sets tend to be very large in sizes often they can be 10 million points in size. Kubla Cubed uses can in theory convert this data into TINs and analyse the volume difference, however memory, graphics and processor limits will start to be hit therefore Kubla Cubed has a built in point reduction algorithm. If you import a large data set you will get a message asking you if you want to reduce the point cloud. If you select yes you will get the point thinner window, as shown below:
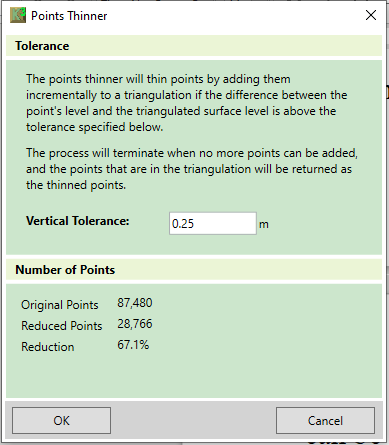
Currently it is recommended that the maximum point cloud at which the software becomes difficult to operate is 80,000 for a modern laptop and 150,000 for a modern desktop PC.